|
Before electronic heading-hold and rate-hold gyroscopes, coaxial
rotors, and mass-produced, highly engineered and prefabricated model
helicopters, the pioneers had to design, build, and then learn to
fly their creations without the benefit of someone to teach them.
Such was the case even as relatively recently as 1972 when Gene
Rock wrote this article about his trials and tribulation involving
his home-grown S.S.P. radio controlled helicopter.
Those certainly were not "the good old days" for those who desperately
wanted to won and fly an R/C helicopter, but did not possess the
skill and/or resources to do what Mr. Rock did.
Here is the article from a month earlier that describes the construction
of the S.S.P.
Learning to Fly the S.S.P.
PART II
FLYING A HELICOPTER IS LIKE BALANCING ON TOP OF A HARD SPHERE
ON A HARD, SMOOTH SURFACE. STAYING ON TOP TAKES CONSTANT CONTROL
INPUTS, BUT IT CAN BE DONE WITH ENOUGH PRACTICE.
by GENE ROCK
The next step is to tether your model. Put two stakes into the
ground about 50 to 60 ft. apart if possible. (Weights can also be
used.) Place the model in the center facing one of the stakes. Tie
a cord from one side of the main landing gear to one stake and the
opposite side to the other stake. Do not allow any slack. This tethering
allows the model to yaw 90° on the ground but keeps the cord away
from the tail rotor. The model can move fore or aft ± 10 ft. and
sideways ± 2 ft. approximately. The model can also rise 8 to 10
ft. off the ground.
Now you are ready to briefly raise your model off the ground.
Again advance the throttle slowly. Play with the cyclic stick and
watch the main rotor. If there is a wind, try to keep the rotor
horizontal or slightly high down-wind. Let the model rise off the
ground and immediately settle back; if the model yaws, adjust the
tail rotor collective by either the pitch arm or the servo linkage.
If the tail rotor rate gyro is used, adjust the collective so the
gyro remains vertical at operating speed. Remember, make your adjustments
for tail rotor collective when the engine is running at a constant
speed.
Next, observe the pitch. Add weight just behind the nose-wheel
until the model hovers with the swash plate horizontal. The model
may hover slightly nose down. It should balance about 1/4 to 1/2"
forward of the rotor shaft. (I have never had a nose-heavy helicopter.)
The swash plate probably will be tilted slightly left to offset
the tail rotor thrust. Again observe the rotor when applying cyclic.
Does it move purely fore and aft when longitudinal cyclic is applied?
If not, rotate the swashplate. My pitch link on the swashplate leads
the blades by about 10°.
This entire procedure may seem long and tedious, but in time
will become in-stinctive and will not require more than a half hour
if you are already familiar with fixed-wing RC flying.
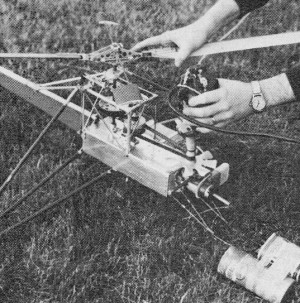
Using an electric starter. Note long needle valve
extension.
Flying: This is where the fun starts. It can also
be an extremely trying time if you have a ship of your own design,
for it can take up to two months to debug it. But then, nothing
is more satisfying than flying one's own creation. The S.S.P. in
the configuration shown has been debugged and should present few
problems. With your model tethered, play with the controls to
familiarize yourself with them while the model is on the ground.
Try to taxi it. I found it difficult at first to work all four controls
simultaneously. Raise the model off the ground occasionally. The
easiest way to take off is to taxi to the extreme forward position
and apply power - the tail will rise. Slowly pull back on the stick.
As soon as the model is horizontal, neutralize the stick, or the
tail will drop and it will start flying backwards. Using this procedure,
you should be able to fly the model to the top of the tether. This
is an exercise to familiarize yourself with longitudinal (fore and
aft) cyclic. Since the tether lines are taut, lateral (sideways)
cyclic and yaw are stabilized. Another exercise is to keep one tether
line taut by applying a small amount of lateral cyclic. Raise the
model off the ground to about a three- or four-ft. altitude. This
is a throttle, longitudinal cyclic and yaw exercise. A pure lateral
cyclic, yaw or throttle control cannot be obtained with this tether.
Although limited, this tethering system should prove satisfactory
for most people.
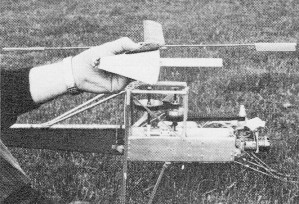
Setting main rotor pitch at 8 degrees.
Another more sophisticated method, proposed by John Burkam, is
to attach pulleys to the stakes so the cord is. a closed loop. Attach
a five-ft. cord some-where along the return cord. Secure this cord
to a third stake. This method of tether allows the model to move
sideways as much as it does fore and aft. As you become more familiar
with your model, and keep it in the air for longer periods of time,
it will jerk when the tethering limits are reached. A screen door
spring cut to four in. long and attached to the landing gear will
soften this blow.
Because the tether does not pick up the model at the center of
gravity, a strong moment is applied when the model is in the extreme
aft position. Forward cyclic will not right the model. Chop the
throttle and taxi back to the center.
Securing main rotors after adjusting.
After three to five hours of tethered flight, you should be familiar
enough with the controls to fly free. When the model is released
from tethering, flying it is a whole new ballgame. Be very cautious
as you were when starting tethered flight. Start by putting the
model into the air and try to keep it from translating (i.e., into
forward flight). Keep practicing until you can keep the model in
the air for about 30 seconds in a confined space, 50' x 50' x 50'
for example.
I find the best way to control the model is to give the cyclic
stick a large displacement for a second and then to back off to
about 1/4 to 1/2 of its travel. The model is very slow to respond
to a small input because of the large main rotor gyro. If the gyro
is made smaller, the model will respond faster but will be less
stable and therefore harder to fly. The opposite is also true, provided
more cyclic can be fed into the paddles on the gyro. At first your
stick motions on the transmitter will be very erratic; in time,
you will learn to anticipate the model because of this time lag
and the stick motions will become smoother. It took about 15 hours
before I could hold the model in one spot. Don't be surprised if
it takes you just as long!
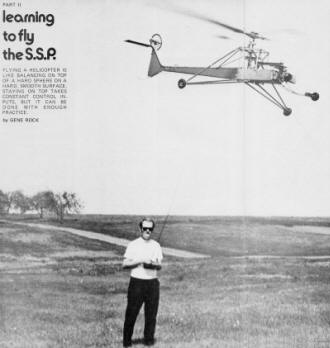
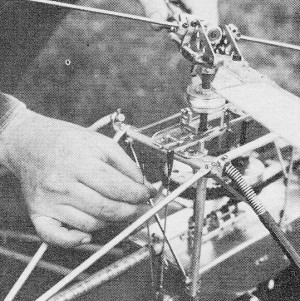
Adjusting tail rotor collective by setting both
blades individually. Note horizontal stabilizer for trimming forward
flight.
When learning to hover, a slight breeze is helpful. The wind
keeps the model pointed into it, therefore less tail rotor correction
is needed.
It takes less power to fly the model just off the ground up to
a distance of 1 1/2 times the main rotor diameter. The model is
riding on a cushion of air - this is called ground effect. The helicopter
can be very skittish in this region, like a ping-pong ball rolling
off a table. (This effect is less noticeable over grass.)
The fuel tank level plays an important part on the trim of the
model. A full tank makes the nose heavy, and a low tank, the opposite.
The trim pot on the transmitter should be able to correct this,
but in time you will not notice this change as much. A central tank
draining into a small tank at the engine using the chicken feeder
system could correct this, but I don't recommend it as this system
is troublesome and does not allow stunting. The fuel pick-up in
my tank is in the front because the model usually flies nose down.
Now you are ready for forward flight. Select a calm day and take
the model to a large field. Practice flying forward for about 50
feet, then set the model down. You will notice that, as the model
picks up speed, it will climb as long as the rotor remains close
to horizontal. In hovering, tail rotor collective is used to yaw
the model. To yaw in forward flight, lateral cyclic is used and
made smoother if tail rotor collective is also used. This is just
like coupled rudder and aileron on a fixed wing. When making a turn,
longitudinal cyclic is neutralized or slightly aft to keep the model's
nose from dropping just like up elevator. When coming out of a turn,
forward cyclic is fed back in. If not, the helicopter will climb
like a rudder-only model. Fixed wing experience is very helpful
in forward flight especially when the model is coming toward you.
Learning to fly a helicopter in forward flight can be a slow process
without this knowledge.
Try flying the model in 50-ft. diameter circles around you. Keep
the forward speed down to about 10 to 20 mph. Once you are proficient
at circling, try figure-eights. When you can come out of one turn
and proceed into the opposite without pitching up, you have achieved
your rotary wings.
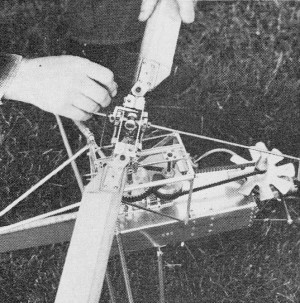
Setting up the links for the swashplate for lateral
and longitudinal control.
The tail rotor in forward flight becomes more efficient, causing
the model' to turn to the left. This is very noticeable when flying
in a wind of 10 to 20 mph, If the trim pot is full left when hovering,
there should be enough right trim for forward flight. Unlike fixed
wing, there is no "neutral" cyclic stick on a helicopter, so you
may not notice this effect. The main rotor also becomes more efficient
in forward flight as long as it remains close to horizontal; therefore
it takes less power to fly at about 20 mph. The maximum power required
is when the model is traveling at its maximum speed. This is because
the rotor is about 20° to 30° off of horizontal and the model requires
power to drag it through the air. A good way to illustrate this
effect is to taxi down a paved surface. Gradually build up speed
with throttle and forward stick. When the model is traveling anywhere
be-tween 20 to 40 mph, neutralize the cyclic stick. The model will
jump into the air and continue to climb. This is a good way to lift
a heavy payload. You may find your engine four cycling in forward
flight to maintain a given altitude. This makes for long engine
life.
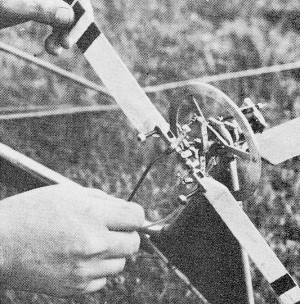
Observing main rotor for proper tracking. It
helps to have different color tips on the blades.
To adjust the horizontal stab, select a day with winds of 20
to 30 mph. Fly the model forward as fast as it will go with full
throttle. If the model dives, shim the leading edge down. If it
climbs, shim the trailing edge down. Once trimmed, the model should
have good penetration. The horizontal stab also acts as a pitch
damper when hovering.
If the model is built without the tail rotor rate gyro, a vertical
fin is a must. The vertical fin would act as a yaw damper and make
controlling with tail rotor collective much easier. A vertical fin
painted a bright color also makes the model easier to see at a distance.
The fin should have about 1/3 to 1/2 the area of the tail rotor
disc. This will require more power to the tail rotor but will not
be noticed.
After flying this model for awhile you will find large landing
gear can create an optical illusion interrupting your orientation.
For this reason, keep the model upwind. Scale-like skids and a fuselage
can correct this. As you get better, shed the large landing gear.
I would like to remind you that this model was designed as a trainer
and as such is limited.
I don't expect anyone to follow the plans completely and if a
fuselage is decided upon, make it integral. An integral fuselage
would require extensive redesign but would not add the extra weight
that a fuselage shell, only for looks, would. Try to keep the fuel
tank visible.
Trimming:
Fill the fuel tank and start the engine with an electric starter,
making sure the engine throttle is on idle. Use a starter with an
rpm range of 2000 to 3000 - a higher speed starter would engage
the clutch causing unnecessary wear even though it would start the
engine. I like to hold the model above my head when adjusting high
throttle; others like to adjust the model by lying on the ground.
After high speed is set, adjust low speed so that the clutch does
not engage. Again hold the model above your head and tilt the model
fairly rapidly in one direction, then stop suddenly. If the main
rotor gyro is functioning properly, it should take 1 1/2 to 2 seconds
to become perpendicular to the main rotor shaft. If the interval
is less, add weight to the gyro. Yaw the model physically (rotating
about the vertical axis). The model should resist your force if
the tail rotor gyro is working. Next check your controls. Make sure
you have a good grip, as the force can surprise you, especially
the yaw control. Have your helper move the stick slowly. If the
swashplate is hooked up improperly, or the tail rotor is backwards,
'don't feel bad - I still make that mistake.
Tracking the main rotor blades can be quite simple if the tips
are painted contrasting colors. Use an adjustable protractor or
the equivalent to set the collective of the main rotor blades. An
8° setting can be used with the Enya 45 and the Murphy muffler.
Start the engine and slowly advance the throttle. Observe the blade
tips and adjust until they describe the same plane by rotating -20.
When the blades are tracking, lock their setting by tightening the
No. 6-32 x 1 1/4" bolts in the hub.

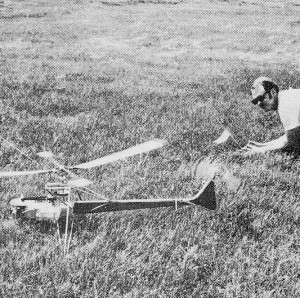
Tether system allows learning forward and aft
cyclic control only. Taut lines prevent a turn-over. Tail rotor
control can also be practiced.
Hovering in a crosswind can be very difficult requiring almost
total tail rotor collective. Increase tail rotor collective travel
to +20° -5° if required.
Chopping the throttle back to idle when the model is hovering
can be disastrous. The model drops into its own downwash arid continues
to drop; applying power will only make this condition worse. Push
the cyclic stick forward. This will pull the model out of the downwash.
The only time that this can happen is when the model has no velocity
with respect to the surrounding air. This sometimes can be the case
when dropping in for a flaired landing. Always keep the model moving
forward during this maneuver.
The flaired landing is performed from forward flight by pulling
back on the stick to slow the model and chopping the throttle to
keep it from climbing. Give a short engine burst just before touchdown.
To spin the model, just hold full tail rotor collective. A slight
amount of opposite lateral and forward longitudinal cyclic may be
required. Don't do this maneuver until you have complete confidence
in yourself and the model, for it is easy to loose orientation.
As you improve you will find that this helicopter can be banked
almost 90°. This requires hard lateral cyclic, then ease off. The
90° bank should only be continued for about 30° of the turn, for
the model will drop drastically. You might even roll it if full
lateral cyclic is held.
The stall turn is performed at close to maximum speed. Pull back
the longitudinal stick until the model climbs at about a 45° angle.
When the model slows down and stops, give it hard left tail rotor.
When the model has spun 90°, let up on tail rotor while still holding
some aft cyclic. The model will come right back down the same path.
Learn this maneuver well for it just may save your model some day.
Using lateral cyclic when downwind to turn the model takes time
and allows the model to drift further downwind.
The same procedure that is used for stall turns can end up in
a loop if just longitudinal cyclic is used. The S.S.P., with the
large landing gear, will not coast through a loop because of the
low center of drag. The loop has been accidentally performed by
the Dieter Schluter Hueycobra when making a stall turn.
The S.S.P. weighs about 7 lb. and has been flown at 9-5/8 lb.
This represents a lot of fuel when going for an endurance record.
Do not load the model up over 10 lb. for it will suffer a control
loss. The main rotor thrust is about 11 lb.
I am very interested in hearing about your progress in this field.
Please do not hesitate to ask questions. Write to me in care of
AAM.
In flight with the tethers very loose. Happy
landings.
Notice:
The AMA Plans Service offers a
full-size version of many of the plans show here at a very reasonable cost. They
will scale the plans any size for you. It is always best to buy printed plans because
my scanner versions often have distortions that can cause parts to fit poorly. Purchasing
plans also help to support the operation of the
Academy of Model Aeronautics - the #1
advocate for model aviation throughout the world. If the AMA no longer has this
plan on file, I will be glad to send you my higher resolution version.
Try my Scale Calculator for
Model Airplane Plans.
Posted February 18, 2012
|