|
Perhaps it is fitting that a
man named "Wright" should have been so successful in setting model airplane endurance
records. Being from New Zealand dismisses any possibility of a direct relationship to
Wilbur and Orville, though. Les Wright attributes a large part of his success to having
personally designed, built, and operated a reliable radio control system for both his
powered and non-powered series of 'Mark' aircraft. His models were essentially very large
free-flight designs with radio control to keep them within eyesight. There are multiple
mentions of a 'relay-tor' device for control surface movement. A Google search of the
term turned up nothing, but I assume from its description in the article that it is a
combination of a relay and actuator (hence the '-tor' part).
The Long Project
In Two Parts Part One
by Frank Bethwaite
The man who has accomplished more endurance flights than anyone else in the world
tells a fascinating story of experiments and developments, good and bad, taking place
over a period of many years. These are the results in designs, glider and power, and
in the radio.

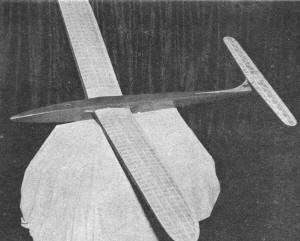
The engine-on-strut designs were proved in New Zealand. Author and
power model, Mark 2.
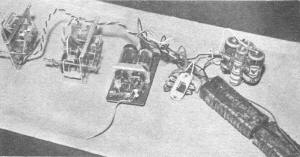
Radio gear used on the record flight, relays eliminated. Model capability
over 40 hours.
My long-time friend Les Wright first flew a model under radio control of sorts in
1935. By 1951 he had developed a reliable non-critical system which was immediately adopted
and used with every success by the group which had gathered around him. Radio gear that
worked every time focused attention on the model, which until then had been only a test
vehicle. With radio problems no longer dominant, the strictly radio members of the group
dropped out, and diehard free-flighters, their imaginations stirred by the design challenge
and ultimate possibilities of radio control, moved in one by one.
I was one of these late-comers. Les gave me a radio set, and I had perforce to think
of something to do with it. The absolute world duration record had always challenged
me. Design of the model was not too much of a problem, but it had been idle to dream
of keeping a free-flight model in sight, hour after hour in New Zealand's windy climate,
unless the timekeeper was carried by aircraft. Cost of a series of attempts would be
prohibitive - I never fooled myself by thinking that the first attempt would be successful.
Overnight, as it were, radio control offered me a cheap and practical method of keeping
the model in sight of the time-keeper, as opposed to keeping the time-keeper in sight
of the model. The project was born. Les and I teamed up, he to supply the radios, and
I to handle the airframes, with a new and startling purpose behind radio control.
Our plan hinged upon the climate around Auckland. Prevailing wind is Westerly and
squally, but in summer steady North-easters often blow. At any season there are a few
random near-calm days. Discussion with forecasters and study of meteorological records
convinced me that it would often be practical to slope-soar a glider over suitable terrain,
and that this technique offered real possibility of long durations. For the rare calm
days a power model would obviously be required. Two models were envisaged from the outset;
a glider for slope-winds and a flying fuel tank for quieter days.
Les Wright's radio gear is a super-regenerative receiver wired directly to an escapement
which we call a relay-tor. No sensitive relay is used. A hard valve detector (1R5 is
transformer coupled to a hard valve output (3S4). The transformer attenuates all frequencies
except the characteristic hiss of the idling super-regenerative receiver. This hiss,
rectified, is used to back off the output valve. Hiss disappears on receipt of signal;
the output valve then conducts. Filaments use 1.5 volts at 150 ma. Plates use 45 volts:
approximately 1 ma runs the detector and another 1/2 ma "leaks" through the output stage
to the relay-tor with idling rising to about 9ma on receipt of signal. This current change
from 1/2 to 9 ma at 45 volts has proved enough to operate a well-made escapement direct;
several models have thus been flown. But the standard relay-tor is an escapement mechanism
fitted with a trigger arm so that friction loads on the armature are reduced to one-fifth
of the direct load. Operation is left-center-right-center with turn held as long as the
key is depressed.
The transmitter radiates on 35.7 mcs. Power, at 0.8 watt, appears trivial compared
with contemporary overseas practice, but control is certain up to extreme visual range
at least.
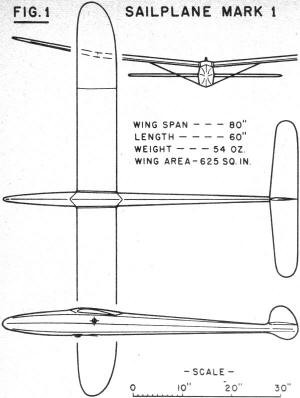
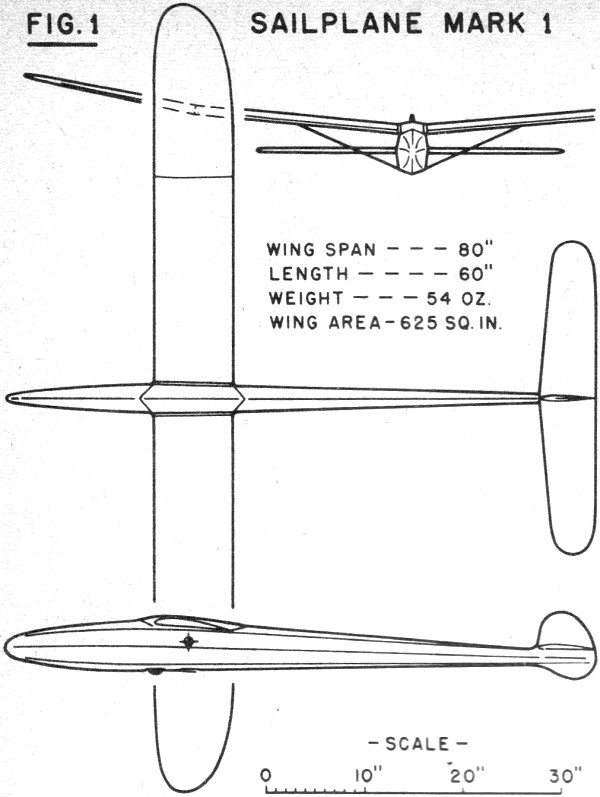
Fig. 1 - Sailplane Mark 1
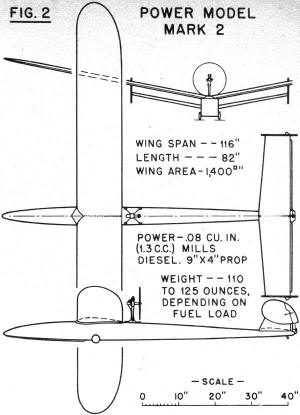
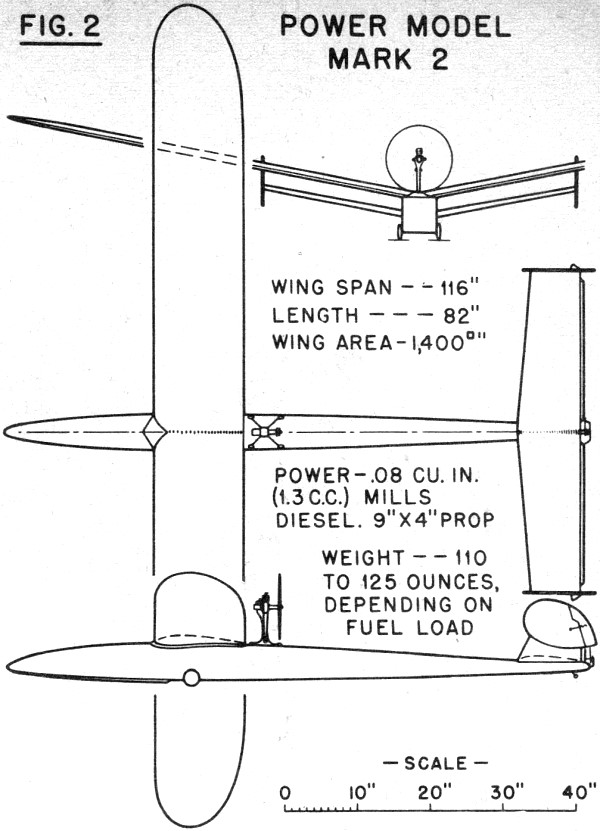
Fig. 2 - Power Model Mark 2
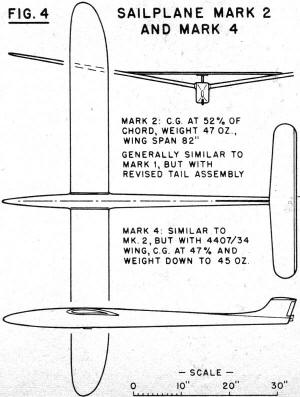
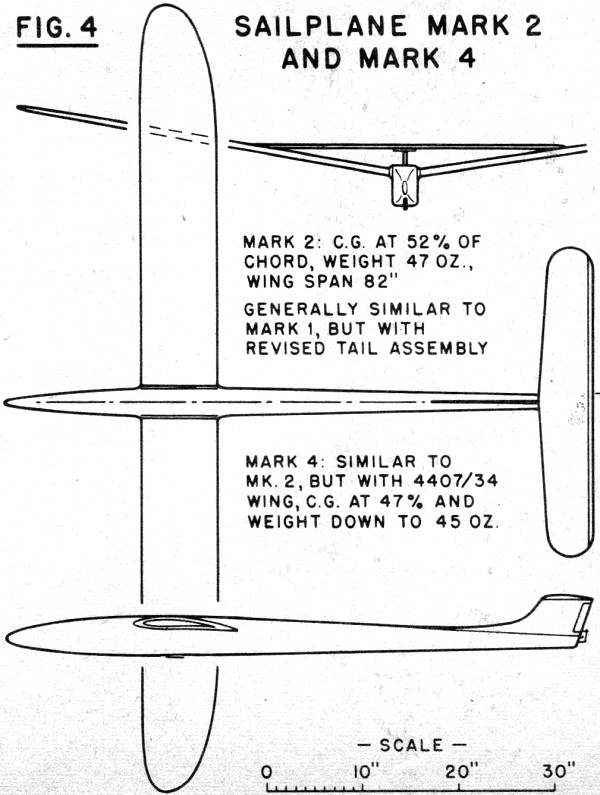
Fig. 4 - Sailplane Mark 2 and Mark 4
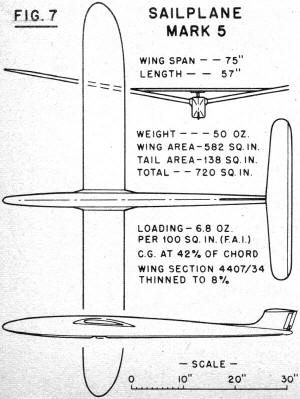
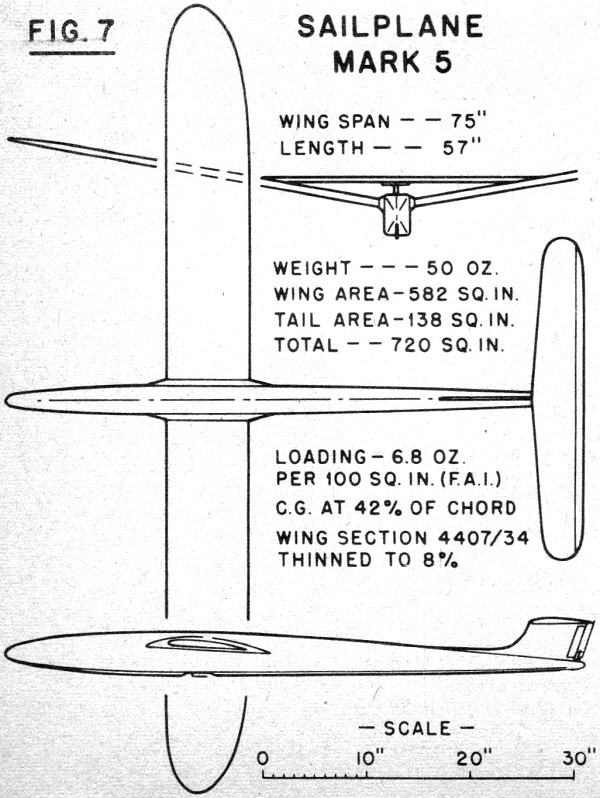
Fig. 7 - Sailplane Mark 5
The two-control system developed for use in later models employs a rudder, relay-tor
modified so that it will perform its normal function and, in addition, will operate a
second relay-tor when desired. The principle is to arrange two series contacts such that
they will both be closed only if a very short pulse is transmitted; at all other times
one or the other is open. In practice, all normal control of the model is deliberate;
the key is held depressed for a minimum of about one-quarter second even when throwing
away an unwanted turn, and a definite snap action is necessary to select the second control.
The method is to slow down the rudder relay-tor drive-shaft with a Bonner-type rattler,
and to fit the two series contacts, one as the "up "stop of the armature, and the other
a wiping contact set to make and break slightly before the "turn" position of the drive-shaft
is reached. During all normal deliberate operation, the armature is always down and the
first contact open as the drive-shaft moves 90 degrees from neutral to turn, thus the
wiping contact does not complete any circuit. But, if at any time a pulse is transmitted
short enough to pull the armature down and let it up again before the drive-shaft has
rotated past the wiping contact, then the two series contacts are both closed momentarily
and current flows briefly to operate the second relay-tor. No extra batteries are needed
and no modification to the transmitter is required. We call this system "quick-snap";
it has proved absolutely practical and reliable. Perhaps its greatest virtue is that
its nature of operation is such that confusion in the mind of the operator does not occur.
The practical virtue of this gear is its mechanical simplicity and ruggedness, its
freedom from requiring critical electrical adjustments, and its tolerance to voltage
variation. Installed in the model and tuned, it will operate over a filament voltage
range from 1.6 to 1.1 volts, and an HT range from 45 to 32 volts. Although lightweight
batteries are used in small models, it is customary for large models to carry HT batteries
of 8 ozs. weight which generally last six months or more. Filament supply is usually
one 3 oz. cell. Receiver and case weigh 3 ozs., the relay-tor 2 1/2 ozs.; total installed
weight is normally 16 ozs.; plus another relay-tor for two controls.
The first glider (Mark 1) was designed to carry 16 ozs. of gear, to fly at 30 feet
per second or more, to be big enough to be seen at range, and to be really tough. Following
closely the proportions of a highly developed A2 glider, it came out at 80" span, 60"
long, 625 sq. ins. area with a 13% thick flat-bottom section, 80" of 1/4 x 1/24 rubber,
which I wound 30 turns per inch (50% breaking) to 2,400 max. A 3 oz. Venner 5-amp/hr.
accumulator stored a potential 20 hour's filament supply.
It still amazes me to recall its first flight. One warm day in Sept. '52 we took the
model to an inland valley up one side of which a gusty wind was blowing. Once trimmed,
it soared up and away from a hand launch, flying easily and cleanly at several hundred
feet, and control proved so docile that I let a bystander fly it for several minutes.
After nearly half an hour the model was deliberately flown into the downdraught over
the windward side of the valley, and I went home thinking how easy was this technique.
It was several months before I made the next successful flight, and about two years
before I found out why that first flight had been successful.
That glider was taken out, in the weeks that followed, on every possible occasion,
first to this slope and then to that. Gradually I learned that a slope is not enough
- a very abrupt rise is required. I saw that unless the model is launched and can be
held above the level of the crest it will probably never rise at all. (This makes hand
launching critical at all times.) I found that the area of lift near the crest of a slope
is very small indeed, and is so close alongside the crest that the slightest control
error is disastrous. I learned that lift could be expected from a warm wind, and that
little lift could be expected from even a strong cold wind. I discovered the fearful
turbulence that exists near the ground behind the crest, and even in front of it unless
the wind comes clean to the slope - for this reason I now reject all slopes other than
those facing the open sea. The model meantime took a fearful beating, because by the
very nature of slope soaring a model hits steep country hard. I watched seagulls as I
had never watched them before, and observed that at times they soared low along the exact
line of the crest with every bird following exactly the same flight path, yet a few minutes
later these same birds would be soaring hundreds of feet up with strong lift evident
over the whole area. I saw gulls below crest level flapping along at the same time as
those above crest level were gaining height soaring. I worked out the technique of hand
launching as hard as I could throw, straight into wind off the crest, with turn on such
that the model would turn out of the stall and hold the vital 20 or 30 feet gained. Slope
soaring proved bitterly cold. I wrapped up in an old duffle coat even in summer. It was
a great shock to my free-flight soul to go about eyeing the country for the steepest
and most exposed and windiest ridge for a place to fly. Through all this time of disappointment
and failure there were many occasions when I would have given up if it had not been for
the memory of that first flight - which had soared away so well, I now realize, solely
because the valley had been emptying itself of a big thermal bubble and this had been
the key to the first 100 feet of altitude.
Experience accumulated until I was able to pick those conditions under which a clean
launch and sustained flight could be expected. On Jan. 7th, '53 a group of friends gathered
and we flew the glider for 1 hr. 9 mins. and landed it deliberately. The current FAI
R/C power record was then 40 mins., and no glider record had been established. The object
of that flight was to prove the paper channel between New Zealand and FAI. A record claim
was put in.
The N.Z. Model Aeronautical Assn. is affiliated to the Royal N.Z. Aero Club, which
is affiliated to FAI. The flight was accepted as an NZ record, and forwarded to FAI on
my behalf. In no time at all FAI approval came back, followed in due course by the formal
"Diplome de Record." It was as simple as that.
Any project which, from the outset, envisaged durations of 8 hours or more was clearly
going to run into trouble over the matter of officials. The NZMAA is an old established
body (early 1920's) and their rules are as strict as any in the world. It is required
that two senior affiliated members be present throughout any record flight, one to time
and the other as witness. My work as a trans-ocean airline captain knows no weekends,
and the probability of my being free on any day when the weather would be suitable for
an attempt, and at that time being able to talk two friends into devoting virtually their
entire day towards helping me on what would be on most occasions yet another unsuccessful
endeavor, looked remote. I perused the FAI code sportif, .and asked the Council of the
NZMAA to consider the problem and advise me if any alleviation were possible. They were
most cooperative. A strict reading of the code sportif indicates that an endurance record
must hang on the testimony of one timekeeper - "an official appointed by the National
Aero Club" - and that the various other officials need not be present throughout the
entire flight. (Consider, for example, the case of a model being followed by a timekeeper
in a light aircraft.) The NZMAA ruled that in the case of a notified project which was
continually under observation by their officials, the testimony of one senior affiliated
timekeeper would be held to comply with FAI, provided that the launch was witnessed and
the flight in all other respects complied with the stricter NZ rules. They also ruled
that small movements of the transmitter, essential to the operation of the flight, were
considered permissible within rule; "The transmitter shall not be moved during flight."
This was in response to two specific problems. I have often used the runway of an airfield
for take-off in an attempt with the power model. Once airborne, it is mandatory that
I quit that runway! And cliff soaring has hazards enough without trying to land the model
right on the brink. If a model has been held under control for several hours, it is clear
that a small movement to some nearby vantage point, for the purpose of a better and more
feasible approach, should not be held to invalidate the concept of control.
The glider was by now thoroughly "shocked." It was stripped and re-glued, and fitted
with a tow-hook. It surprised us. Delightful to tow in a breeze, it carried 700 feet
of 14 lb. nylon right overhead. As we learned to handle it better in the pleasant flying
over a smooth airfield, we realized that to tow-launch the start of a slope-soaring flight
would be practical and would eliminate entirely the critical hand-launch. So it has proved
except for occasional trouble with severe turbulence behind the crest. In the next few
months we tried twice to exceed the hour, but the model blew away backwards once at 51
mins., and again at 63 mins. There was no room inside that model to fit a second control
for elevator, so, as the power model was by then causing enough trouble, the glider was
relegated to fun only.
The radio had never missed a beat. And there we can leave the glider project meantime.
In designing the power model, I envisaged use of 2-control radio gear such that the
model could be both turned and controlled in altitude. By FAI definition a model must
weigh no more than 5 kilograms, or 11 1/4 lbs. Radio gear would weigh 1 1/4 lbs. which
left 10 lbs. to be split between airframe and fuel. Throttle, to permit controlled descent
under power, was desired, and with these thoughts in mind many likely motors were tested.
The ideal motor would be reliable, have a low specific fuel consumption, and be easily
throttled.
Spark ignition burned little fuel and throttled well, but I could find no way to prevent
plug fouling during prolonged idling. Exit spark. Glow motors were reliable, and throttled
beautifully, but they burned so much fuel as to compromise the whole idea of long duration.
Exit glow. Diesels seemed reliable and burned little fuel. Tests began to concentrate
on the Mills 1.3 cc. It would run indefinitely using about 3.3 ozs./hrs., but, set like
that, it would not idle. With compression backed off and mixture enriched it would run
just as well, and idle well too, but at a consumption of 6 to 7 ozs./hr. Exit idling.
The concept changed to a model running at constant power using elevator trim control
to shallow dive to reduce altitude.
Sailplane, Mark 5, used to set International records. On tow-launched
flights, ship went overhead on 700 feet of line. Much was learned from a study of sea
gulls in flight, cloud formations.
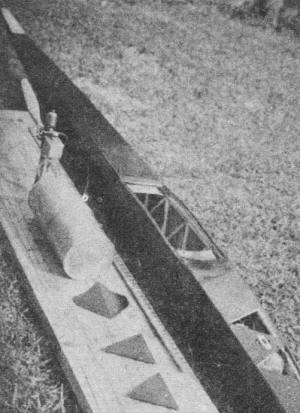
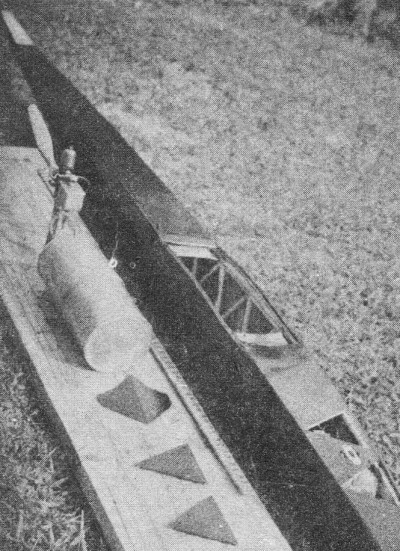
Two tin cans soldered end to end made up a pressurized tank for Mills.
Span nearly 10 ft.
Power available would be about .075 hp., and thrust at a flying speed of 25 ft. per
sec. would be 10 to 12 ozs. assuming a prop efficiency of 40%. As this design, too, would
follow the proportions of my well investigated A2, I was able to be reasonably certain
of what could be done with 10 ozs. of thrust. The A2 developed a Lift/Drag ratio of 12.5/1.
I believed that, by keeping the power model as clean as possible, in particular tolerating
no undercarriage drag, it could be designed to develop at least 10/1 L/D. Thus with 10
ozs. thrust it should fly at 100 ozs. or better. I aimed for a 30 oz. frame, 20 ozs.
of radio, and 50 ozs. of fuel, and built power model Mark 1. Span was 116", chord 12.5",
area 1400 sq. ins. Fuel was stored in a long plastic bag running span-wise between the
front and rear wing spars, and fed by gravity to a float chamber near the motor. This
model was built to its design weight, and flight characteristics were most promising
so far as ultimate performance was concerned; but excessive flexure of the tail booms
under elevator download was at first frightening and shortly thereafter disastrous. (Editor
- This model had a built-up pod-type fuselage terminating behind the trailing edge, and
two long, slim booms extending from under the wing, on either side, back to the tail,
the stabilizer being set atop the two vertical fins.) The faster the model flew, the
further back the center of pressure moved, and the greater became the download required
from the elevator. This download bent the booms further down and made the elevator more
positive, thus merely aggravated the dive. It was realized at the same time that the
method of fuel storage was unsound as it would split the wing wide open whenever the
model took a bump on the wing tip. The concept was revised to a conventional layout,
housing the fuel within the fuselage under the wing. The motor remained a pusher, partly
to avoid slipstream drag, but mainly to avoid the drag of a long undercarriage. Main
problem now was fuel storage and feed to the header tank.
Experiments with glorified Jim Walker tanks of plastic or rubber which held 50 ozs.
always eventually leaked or burst. Finally, I decided that can manufacturers knew most
answers about storing liquids, and I soldered two 4" tin cans end to end. This tank,
4" dia. and 9" long, weighs nearly 8 ozs. but it has never leaked nor burst. Fuel feed
is by pressure. A stud drilled with an 80 gauge hole tapped into the Mills crankcase
delivers pressure enough to force fuel up 16", and does not affect running.
The engine has its contra-piston tightened by punching while in position. It is mounted
on a rigid dural and balsa spar which is itself spring-mounted to the fuselage. The whole
assembly balances almost at the crankshaft. The motor runs sweetly and smoothly with
negligible vibration passing through the springs to the fuselage. The header tank is
very lightly spring-mounted to the motor, such that fuel lies quiescent while the motor
is running. The float is a piece of 1/4" balsa dipped several times in auto lacquer.
The float valve is a pin-head. Filters are tiny discs of filter gauze thrust into fuel
tubing with a matchstick. The whole system is simple and visible, and it works.
Various fail-safe devices were considered, and an Aneroid capsule was adapted to cut
off fuel above 1000 feet, but it proved impractical. None have been used.
Radio gear was initially a standard receiver operating a Bonner-type escapement direct;
the third position, when held, made a series contact which reversed the elevator relay-tor
setting. While this control operated satisfactorily enough, I found it clumsy and unhandy
to use when in any trouble, and later changed it to "quick-snap." Relay-tor power was
a 10-foot length of 1/4 by 1/24th rubber which I wound with 4,000 turns maximum.
Weight had by now risen to 77 ozs. without fuel. Flight and ROG at this weight were
encouraging. Fuel was added 10 ozs. at a time, and the prop was cropped and tailored
as seemed best as the load increased. A perfectly balanced 9" by 4", of reasonable blade
area at the tips, thinned paper thin at the tips and highly polished, proved best. At
110 ozs. the wheels flattened sideways under the load and had to be replaced with stronger
ones, after which the model proved capable of consistent take-off and climb with the
tank full at an all-up weight of 125 ozs. It would without doubt ROG at greater weight,
but it is my practice to trim to use the excess power to give more speed, for the model
flies woefully slow.
Polite skepticism has been inferred in some overseas magazines at the report of ROG's
at this weight with only a .08 cu. in. diesel for power. Given a free-rolling undercarriage
directly under the C.G., and unlimited hard, smooth runway to accelerate over, take-off
is not a problem. In theory at least a wing close to the ground is more efficient than
one in free flight, and thus it should be possible to ROG at a weight at which the model
would be unable to climb away. In practice this model accelerates very slowly, waddling
for the first ten seconds, and a still air take-off uses up to 200 yards of runway and
flat airfield in plenty thereafter, for the angle of climb is almost zero.
So much for the model. In order to fly it seriously a day has to be picked in advance
during which the wind is unlikely to exceed ten mph, and the necessary officials must
be persuaded to come to time and witness the take-off, which is best made about dawn
to take advantage of the morning calm.
At this point I must introduce Don Wilson, a quiet and talented civil engineer. Top
line with Wakefields, and a brilliant performer with a hot stunt ship at the end of the
lines (something I could never master), Don now builds flawless and imaginative radio
models and flies them hard and well. From this point on, this story tells how Don and
I, as a team, have worked to turn theoretical possibility into witnessed durations.
(To be Continued)
February 6, 2016
|