|
$25 R/C helicopters are available from Amazon that climb and
turn on demand (kinda). For under
$60 you get a fully controllable model with counter-rotating rotors that anyone
can fly like a pro in after an hour or two of practice.
Double that amount and a 3-D-capable,
ready-to-fly helicopter is available to you, complete with a spread spectrum radio,
gyro stabilization, a brushless motor, and Li-Poly batteries... with a computerized
charger. Engineers have labored endlessly to bring this state of the art technology
to all corners of the world. It was not that way all so long ago.
To wit, take a look at this article from the March 1969 edition of American
Aircraft Modeler magazine, that reported on Germany's first ever R/C helicopter
competition that was held in the fall of 1968. There were no kits (let alone RFTs),
no special heli engines, no gyroscopes, no carbon fiber blades, to "how-to" manuals,
not even any reserved frequencies for the newly arrived proportional radio control
systems. All helicopters there were designed and built from scratch, and no two
looked alike; large number or unique color schemes were not necessary to keep track
of a cookie-cutter production craft.
 As the photos in the article show, quite a bit
of impressive design and machining went into those birds. The owners were true craftsmen
with a high level of knowledge of how helicopters fly. Ask your average heli flyer
today about gyroscopic precession requiring the rotor control input to be made 90°
ahead, and in the direction of rotation, of the desired output, and he'll likely
reply with a deer-in-the-headlights look. Don't expect a scientific explanation
of the function of the flybar providing stabilizing inertial through angular momentum,
either. As the photos in the article show, quite a bit
of impressive design and machining went into those birds. The owners were true craftsmen
with a high level of knowledge of how helicopters fly. Ask your average heli flyer
today about gyroscopic precession requiring the rotor control input to be made 90°
ahead, and in the direction of rotation, of the desired output, and he'll likely
reply with a deer-in-the-headlights look. Don't expect a scientific explanation
of the function of the flybar providing stabilizing inertial through angular momentum,
either.
Enjoy the photos, and appreciate the pioneers who took the figurative financial,
time-consuming, disappointment-filled arrows on their way to, sometimes, success.
Model World... on the International Scene

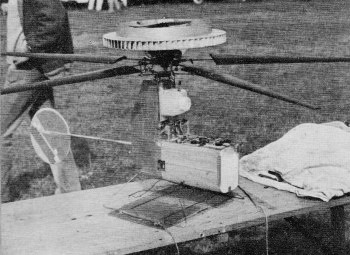
Ewald Dietrich tuning up the motor on his torque-reaction helicopter.
Fuselage is made of fiberglass polyester. Won second place in flight-evaluations
event, a very short flight at that! Control systems is non-proportional type, control
by CG shifting.

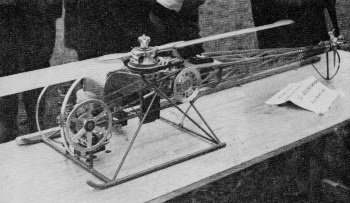
This belt-drive system 'copter had troubles with belts resonating
and coming off the pulleys, so no real flight attempt was made. Its workmanship
was the finest seen. Design is workable, has engine speed, clutch, collective pitch,
anti-torque tail rotor, but no cyclic

Vell, you zee, mein friend, if der mass equals angular velocity,
unf if die wind ist gayen in das roundger spinnen . . . Would you believe, this
is a workable design? Shroud around engine's propeller increases torque reaction.
Controls appear to be collective, cyclic, with rudder and fixed engine speed. Design
by Hultsch.

Although crude, this model has all normal helicopter controls,
cyclic, collective, directional, and throttle. It did not fly at meet, but has flown
before. Hans Knaf found he had too much power, so collected castor-oil-rich exhaust
for lubrication for the gear box. Swiveling, teetering and self-stabilizing rotor.
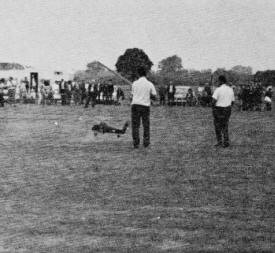
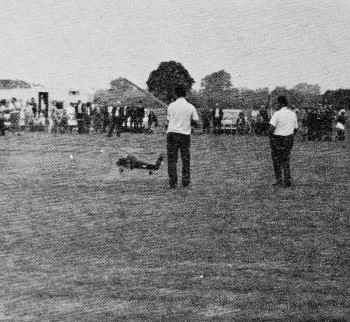
Here is the one and only successful flight! It went up and down
successfully under adequate control. Showed that model design is only half the effort.

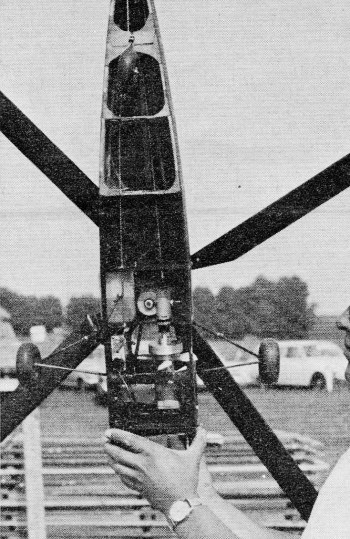
Engine installation shows worm drive to rotor and direct to tail
rotor. All-up weight is 9½ lbs. but lift is 11½ to 12 lbs. Supertigre 60, proportional
radio. Engine-to-rotor ratio is 15 to 1. Main rotor turns 800 rpm, tail rotor 3000
rpm. Tail wheel is realistically full-swiveling. Considering that a real helicopter
requires constant operation of both hands, arms and feet, how does one fly a model
with just two hands on transmitter control sticks?

The tail rotor is meticulously designed four-blade unit. At 3000
rpm the stresses on balsa blades and the fittings are great, but when properly balanced
and tracked, they will give serviceable operation. No airfoil as such is used. Function
is to oppose torque of driven main rotor, and for rudder steerage in flight.
Photos by Flug Magazine
and the author.
First model R/C helicopter competition in Germany had one successful flight but
20 stomping, sputtering, crazy-crashing attempts, yet each model was an ingeniously
crafted masterpiece.

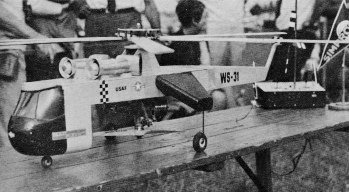
Most of the models were torque-reaction types of several configurations,
engine above, below, and even in the middle. This Sikorsky cargo 'copter by Dr.
Schlattmann has motor below where cargo is hung. Fixed engine speed, collective-pitch
control.

This interesting design by Bergenkotter has engine forward, driving
rotor and anti-torque rotor. Uses Supertigre 60 with centrifugal clutch, bevel gears
and belt drive at rotor. Engine, collective, and tail-rotor control. Although ingenious,
did not fly.

Willy Rolf uses transversely positioned engine, driven rotor,
anti-torque control, and pitch action by CG shift. No provision for left-right control,
so it only will be flyable under most ideal conditions. However, rotors are balanced
for self-stability.

A remarkable and way-out torque reaction 'copter with engine-driving
lower blades and fuel tank, and torque turning upper blades. Fixed throttle and
collective pitch on both rotors! Two engines geared to same shaft are balanced together.
By Stehr/Dortmund. Wonder how you start the engine?

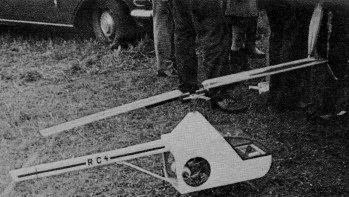
This is a well-designed and built gyrocopter, but not flown because
there was no event for it - perhaps there should be next year. Design by H. Glafey,
has Supertigre 40, nicely shaped body, teetering and balanced rotor assembly, and
rudder control.

This UHD 1 scale model is an attempt to copy the rotor and control
system of the real 'copter. Rotors are auto-stabilized, driven, have full control.
Tail rotor also controlled. Did not fly successfully. Although designs may be flyable,
pilot and control-system limitations may be the biggest 'copter problem.

Fascinating torque-reaction 'copter somehow transfers fuel to
rotating engine from fixed tanks. Tail rotor is driven, fore-and-aft control by
CG shift through rotor-tilting, and collective pitch. By G. Stoerig. Aluminum-tube
frame.

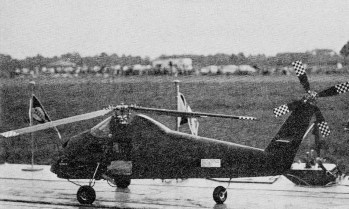
This is scale Sikorsky S58 by Dieter Schluter which won 500 marks
for best flight, straight up - and down! It has fully controlled rotor and anti-torque
tail rotor. Powered by Supertlgre 60 with worm drive to main rotor.

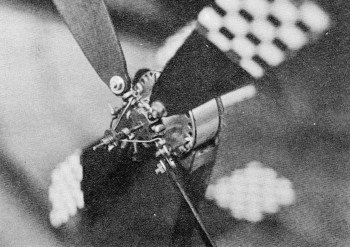
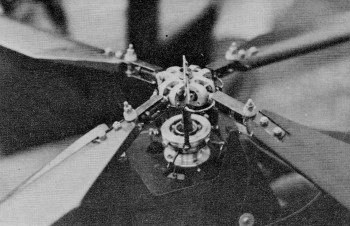
Most of the parts in the rotor head of the successful 'copter
were handmade, carefully assembled by brazing, soldering, and bolting. Rotor blades
can flap, swivel. Controlled in pitch collectively and cyclically. Lots of work
there!

My purpose in attending the Harsewinkel Model Helicopter Show was to help provide
an informational link between American and German modelers to keep everyone abreast
of the latest designs and developments.
I armed myself with 50 copies of the Sept. American Aircraft Modeler, blueprints
on John Burkam's "High Time" free-flight helicopter and a German road map.
Three years ago, Harsewinkel was a quiet little town of about 1200 persons. Today,
thanks to Simprop Electronics and International Harvester, the population is in
the thousands and growing.
The model flying field is just outside town, located in a nice flat area with
perfect visibility. When I arrived there, several people were getting their models
ready. After the first hour, all my copies of AAM were gone and I was in a daze
from seeing models that staggered the imagination. (I could have sworn I saw Leonardo
Da Vinci and Jules Verne walking around.)
I checked out a good and wild idea by Hans Knaf and his son. Would you believe
9% pounds of Chopper powered by a Super Tigre 60, dual-output transmission (21:1
main rotor and 10:1 tail), a centrifugal clutch which cuts in at 3000 rpms and controlled
by the new Simprop Digi-5 proportional rig? Hans didn't like all that HP going to
waste out of the exhaust pipe, so he tapped it off and now it powers the oil pump
for his transmission. He has to change oil quite often but the "tranny" works like
a charm.
Sunday morning I stood in a light rain with a thousand other people and watched
model after model snort, stomp, sputter, chase people and do everything . . . except
fly. That's right. Not one model actually flew. There was one man who got his machine
to lift off for a 20-foot flight straight up, and 21 feet straight down. That flight
(?) got first place for Dieter Shirlter who built a Sikorski CH-53 that must be
seen to be believed.
His design was a semi-scale job of the U. S. Marine Corps "Jolly Green Giant."
Dieter spent four years of concentrated work to produce this 46" beauty. R/C was
via the Simprop Digi-7, power by a Supertigre 60. What really shook me up was that
his 9%-lb. monster has over 11% lbs, of lift. A 15:1 gear box turns his scale rotors
at 800 rpm for the main, and 3000 for the anti-torque rotor.
Everyone cheered as he collected over $500 in prize money, and 30 hrs. free instruction
in a people-size helicopter. Dieter also received a special prize, an 18" bronze
bust of John F. Kennedy and, for a fraction of a second, things grew solemn. Then
Dieter smiled from ear to ear. The crowd went wild with applause.
After comparison of the designs I saw, four problems stand out as the reasons
these models didn't fly. Cyclic pitch was almost non-existent. Rotor blades were
too thick (some as much as 3/4"). Receiver interference caused by static electricity
generated by movement of the rotor blades, and the problem of too fast a model,
and too slow pilot. If we can't solve the last problem, model helicopter flying
might be restricted to those of us with two heads, five hands and good nerves.
Only three of the designs I saw could really be called true helicopters. The
other designs were close except the motor was not in a fixed position. That means,
if a large pusher prop is turning one direction and facing down, the natural torque
causes the engine and its attached rotor shaft to turn in the other direction. Not
a true "chopper" to be sure, but it sure solves the problem of too much torque.
I was constantly asked by reporters from many countries and officials of the
meet, "Where were American competitors?"
If you are getting tired of the lack of challenge offered by the normal run-of-the
mill model (no angry letters please), let me know if you're interested. I could
also use info on new ideas to tell my German friends.
I believe this is one of the last big challenges in modeling. Without stepping
on anyone's toes, I'd like to know how many of you feel as much satisfaction as
did Dieter Shiilter. By Jack L. Schlecht
Posted March 15, 2024
(updated from original post
on 1/29/2011)
|