|
If you believe that servos with metal gears signify the latest and
greatest in reliable, robust, modern radio control actuation, you
are probably right... unless of course those actuators happen to
be these metal-geared servos from the 1950s. In that case, you might
look at them and wonder how anyone ever managed to get model airplanes
into the air and back safely on the ground when using them. Guys
spent a lot of time and money building large, heavy airframes and
used low power-to-weight ratio engines for lofting vacuum tube receivers,
bulky actuators, and wet-cell batteries into the air. Rubber-band-driven
escapement mechanisms were probably more advanced in design and
implementation than electromechanical servos of the era. Early gimbals
were not gimbals at all, but single-axis control sticks (arms) attached
to rigidly fixed potentiometers. The modern equivalent of a Beep
Box would be the spread spectrum sequencer that encodes the proportional
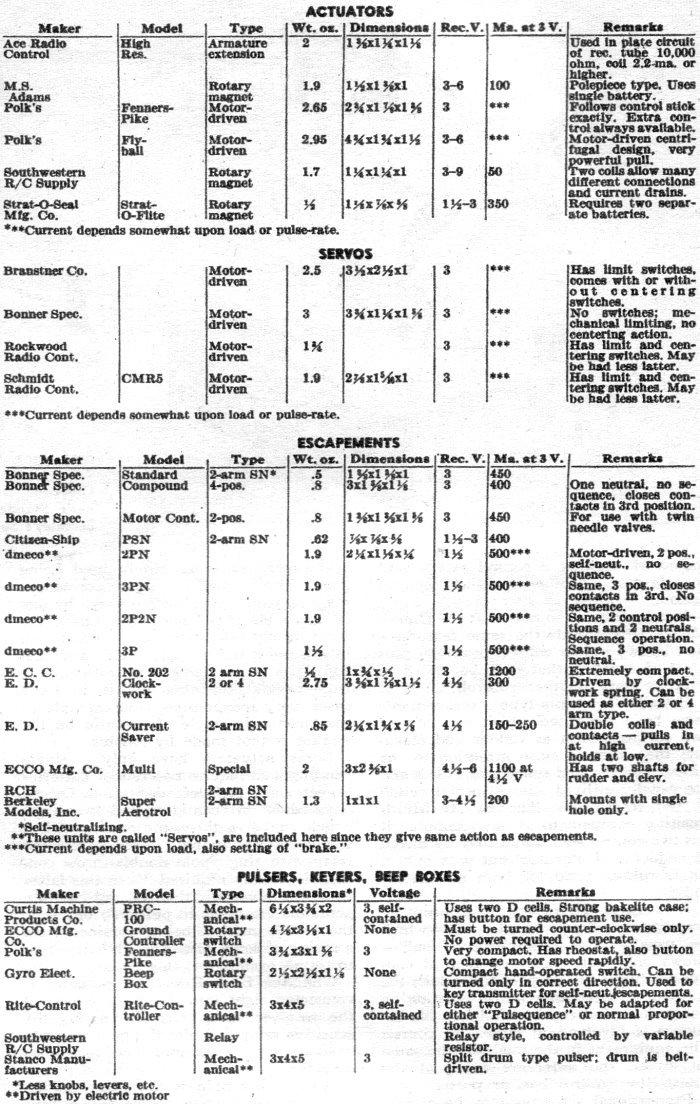
control input. I don't know if this report was exhaustive based
on all equipment on the market at the time, but the tabulated series
of equipment in the list at the end is pretty brief.
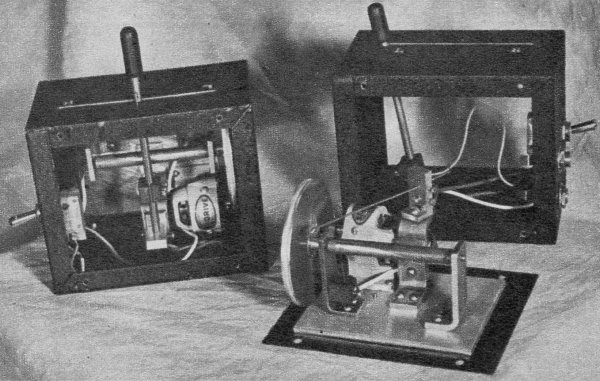
Radio Control Equipment
|
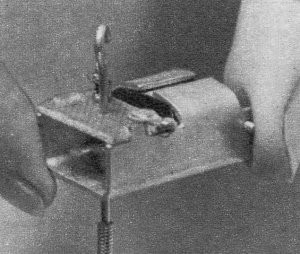
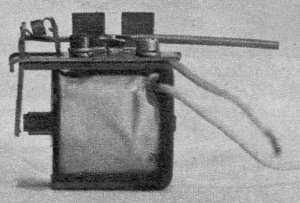
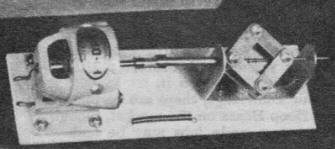
Strat-O-Seal's rotary magnet Strat-O-Rite
actuator shown mounted in fuselage mockup.
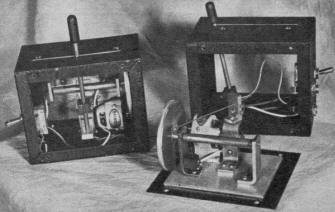
E.C.C. Telecommander's escapement.
Ace Radio Control's hi-resistance actuator.
"Rite-Controller"; pulse sequence or
proportional.
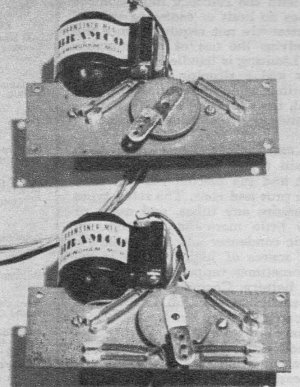
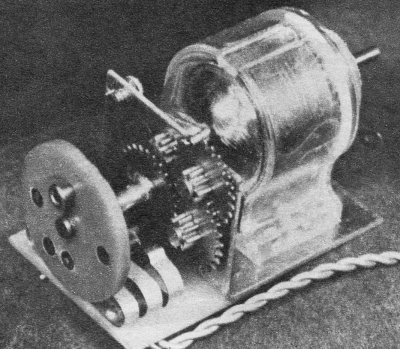
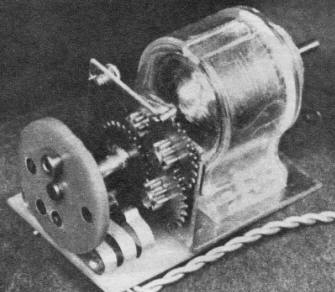
Branstner's motor-driven servo available
in two types.
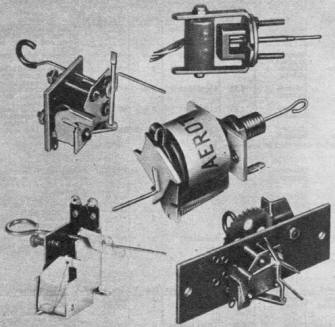
Clockwise from lower left: Citizen-Ship
PSN escapement; Bonner's Standard escapement; Adams rotary
magnet actuator; Berkeley's Super Aerotrol escapement; Bonner's
Compound escapement.
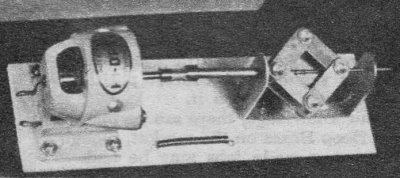
Dmeco (deBolt Model Engineering Co.)
3PN Multi-Servo; one of four versions.
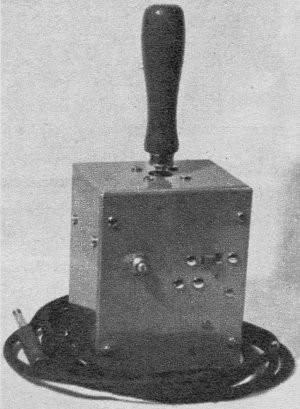
Polk's motorized centrifugal Flyball
actuator.
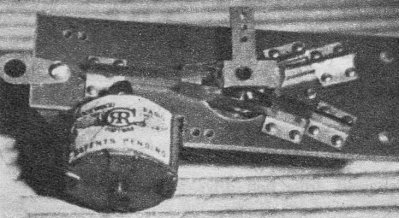
Rockwood Radio Control's motor-operated
servo.
Stanco split drum belt drive mechanical
pulser.
|
Helpful Data on Surface Movement Devices
Today the escapement is still the most widely used surface mover,
but various forms of proportional control are catching on fast.
Just to get our terminology straight, let's jot down the names of
some of these units, and then discuss them at more length. While
we're at it, we'll include the control boxes used at transmitter
for the various systems.
Escapement - generally considered to be a sequence-operating
device; to get control movement, you have to go through a set sequence
of positions, such as left - neutral - right - neutral - left -
etc. Usually the power to move the surfaces comes from a twisted
rubber band, and this power is controlled by an electrical magnet,
which in turn, is controlled by the receiver.
Actuator - an electro-magnetic device utilized
to move the surfaces in proportional control systems. Most of them
have a rotating permanent magnet, with some sort of electrical winding
to move it.
Servo - These are usually electric motor-driven
units, with a gear reduction system to increase power and reduce
speed of the operating arm. Often fitted, with limit switches, which
open the motor circuit at predetermined points either side of center.
May also have centering switches to return the control arm to neutral
when the signal is cut off.
Keyers and Pulsers - control boxes attached
to the transmitter, which send the correct length and spaced pulses
to actuate proportional control equipment in the model.
Beep Box - an automatic switching device connected
to the transmitter which sends the necessary pulses to work an escapement
in the model. Even though the escapement may require full sequence
operation, the Beep Box allows the operator to get successive right
or left turns in any number he wishes.
Not so many years ago, things were very simple; almost every
model was fitted with an escapement, and the only control in wide
use at the transmitter was a plain pushbutton. Things have really
progressed since then! Below is a quick rundown of the various new
types of equipment that you can purchase today; it will be seen
that there is no longer a sharp dividing line between the different
sorts of mechanisms.
Escapements. You can no longer visualize these
units as something to which you must attach a rubber band. We now
have them powered by clockwork and also by electric motors; the
latter, incidentally, are called "servos" by the maker, further
confusing things! The deBolt "Multi-Servos" are really electric-motor
driven escapements, and are made in four types as seen in the chart.
The traditional type of strictly sequence escapement is still
in wide use, and is the lowest-cost style to be had. Most of them
have two control positions and two neutrals, and you have to hold
the signal on as long as you want the control surface to be held
off center. This is considered a safety feature in some ways, since
if your model gets out of range the control surface returns to -
or stays in - neutral. This type of escapement is generally called
a two-arm type.
Three and four-arm escapement have been used, but are not widely
popular, and only a few of the latter are sold at present.
The first commercially available escapement that removed the
sequence requirement was the Bonner Compound, with which you can
get any number of rights or lefts at will; the surface is always
centered when the signal is cut off. This unit offers another feature
- third position in which a set of electrical contacts is closed,
allowing a very simple means of working a second escapement for
elevator or other auxiliary control action.
It is interesting to note that the Dmeco Model 3PN affords the
same features - that is, two rudder control positions, plus a set
of contacts that may be closed at will, to work another control.
Several multiple-type escapements have been marketed which can
control two surfaces, such as rudder and elevator; they require
close attention to the proper number and spacing of pulses and are
usually utilized with a special switch at the transmitter. The ECCO
Multi-Position escapement is an example; it has two control shafts
that may be linked to rudder and elevator, but uses only a single
rubber band for both surfaces.
Actuators. There are two forms of proportional
control in use: one - which we usually term "semi-proportional"
-allows only left, right and neutral control positions; full proportional
allows the operator to have any control position he wants, from
full right to full left. No sequence is involved in either, of course.
The equipment in the model is the same for either, the difference
being at the transmitter control box, or pulser.
Proportional actuators may be of several types, the most widely
used being fitted with a shaft-mounted permanent magnet, which is
caused to move by one or more electrical windings. Again, the most
widely used type has no other iron in it besides the magnet itself
(and possibly the shaft); this type is available from several concerns
and is, in some cases, very inexpensive. One example of the "iron
pole" style of actuator on the market is that made by Adams.
Some actuators have only a single winding, and require two sets
of batteries to get right and left deflection. Others have dual
or center-tapped windings, which can give the same results with
a single battery. In both cases, a receiver relay with single-pole
double-throw contacts is usually required. Even this latter is not
universal, though, for certain actuators are made to pull only one
way, the return motion being obtained from a spring of some sort.
The Flyball actuator is an example of this design.
The Ace High Resistance actuator is connected right into the
plate circuit of the receiver tube, thus eliminating the sensitive
relay and also the power supply needed for the normal low resistance
actuator.
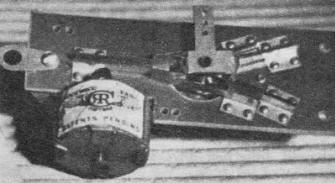
Also in this field is the Fenners-Pike actuator; an electric
motor-driven unit which has a means incorporated for obtaining a
second control action, when wanted. Both controls may be worked
at the same time. As with other styles of electric-motor-driven
mechanisms, this one has considerably more pull than the strictly
magnetic type.
Servos. Servos on the market are powered by
small electric motors. Some are fitted with limit and centering
switches, others are not. In general, the units with both limit
and centering switches have been used for elevator control, while
those with only limit switches work the rudder. Limit switches are
always fitted, however, as they open the circuit when the
control arm reaches an extreme position off-center, and so prevent
jamming of the gearing; connections are such that opposite rudder
(or elevator) will always bring the surface back to center.
Lately, more and more flyers are using what is called "trimmable
elevator," which means simply that the elevator stays where the
operator puts it and does not automatically go back to center when
the control signal is cut off. This system is a lot harder to learn
to fly properly, but offers much more flexibility in aerobatics,
flying in the wind, and so on.
The Bonner servo, which is specified and sold with the Babcock
multi-control system, has no limit or centering switches; the latter
are not required, since the makers advise the use of a trimmable
elevator. Limiting is handled by mechanical stops and a slipping
clutch in the drive gearing; when either limit position is reached,
the operating arm stops moving, but the motor continues to turn.
Keyers and Pulsers. These are made in three
main types, the relay type, the electronic and the mechanical. All
have their own pros and cons. The relay types do not require any
tubes, and many of them are little more than a relay, an electrolytic
condenser and a variable resistor. A source of high voltage is required,
sometimes tapped off the transmitter B battery. Current drain is
quite low and small batteries of 45 V. or so may be carried in the
same case. Chief disadvantage of this type is that the pulse speed
varies as the pulse length is altered - a condition that is troublesome
in some cases and not in others.
The electronic pulsers have one or more vacuum tubes, and hence
require both A and B power. They are somewhat more flexible than
the relay type, and usually the speed and spacing of the pulses
may be varied quite independently of each other. With miniature
battery tubes, power requirements are low and all the batteries
may be put in the pulser case. A relay is always used to connect
the pulsing circuit to the transmitter.
The mechanical type is felt by many to be the most reliable,
but ia the toughest to make and often quite noisy. An electric motor
is geared (or belted) to a set of rotating contacts, with a control
lever arranged so that the pulses may be varied in spacing. Since
battery motors are normally fitted, quite good life may be had from
flashlight cells, and these are sometimes carried in the pulser
case. The PRC-100, Stanco and Fenners-Pike are good examples of
this type.
One other motor-driven unit should be mentioned, the Rite-Control
Pulsequence box, which afford both rudder and elevator operation
on the model; a single 2-arn escapement is all that is needed in
the plane, but since it is stepped around continuously, it must
be fitted with a long rubber band. Rudder and elevator may be applied
separately or together and in any degree and combination.
The control box comes with an extra contact plate, which when installed
allows it to be used as a regular proportional pulser.
Some manufacturers have adapted various sorts of rotary switches
for transmitter control. The ECCO dual escapement is stepped through
its paces by such a switch, and Gyro lists a Beep Box, which is
a rotary switch so made that it can be turned in only one direction,
and will step a regular 2-arn escapement around to the desired control
positions as fast as you can turn it.
To our knowledge, there are no motor-driven Beep Boxes on the
market, though a few custom-made jobs may be had.
From the above it may be seen that the complexity of control
equipment is increasing. Enterprising builders combine various of
the units mentioned above and in the chart, to get all sorts of
special arrangements. Of course, many of the units we have presented
are equally useful for boat and other model purposes; for such use,
the electric motor-driven equipment is preferred, due to the greater
force needed to move boat rudders or car wheels.
Radio Control Equipment
c1955
Posted February 23, 2014
|